Robots
Robots from the web
Please checkout the build instructions of the Ozeki robots first! Once you have built all the Ozeki robots, and taken all the Lego robot courses and lectures offered by Ozeki, you can get inspirative ideas for further robots develeoped by Lego. We list them, so you don't have to spend a lot of time finding the build instructions for them. You can find these robots on the official Lego website as well.

|
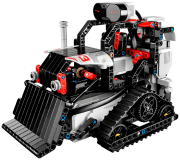
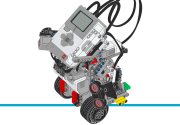
TRACK3RIf you have never build a LEGO MINDSTORMS robot before, we recommend you start by building this one! TRACK3R is a crawler-mounted, all-terrain robot with four interchangeable tools. Start by building the body of the robot, then discover the possibilities of the four different TRACK3R tools: the bi-blade blender, the blasting bazooka, the gripping claw, and the hammer. Control TRACK3R with your smart phone or tablet with the free robot commander app. Build instructions |

|
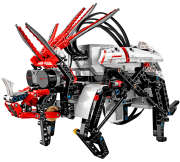
SPIK3RThis six-legged creature doesn’t just look like a scorpion, it also acts like one. It turns sharply, snaps with it’s crushing claw, and it’s lightning tail is ready to fire at anyone or anything that gets in its way. Control SPIK3R with your smart phone or tablet with the free robot commander app. Build instructions |
|
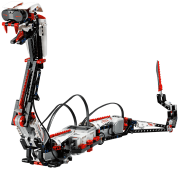
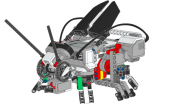
R3PTAROne of the most loved robots, the standing 35 cm. / 13,8 inch tall R3PTAR robot slithers across the floor like a real cobra, and strikes at lightning speed with it’s pointed red fangs. Control R3PTAR with your smart phone or tablet with the free Robot commander app. Build instructions |

|
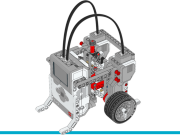
GRIPP3RThe GRIPP3R robot is constructed for some heavy-duty lifting. It’s got the muscle to grab and drop a can of soda with its powerful grasping grippers. Control GRIPP3R with your smart phone or tablet with the free Robot commander app. Build instructions |
|
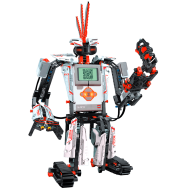
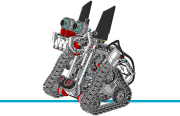
EV3RSTORMEV3RSTORM is the most advanced of the LEGO® MINDSTORMS® robots. Equipped with a blasting bazooka and a spinning tri-blade, EV3RSTORM is superior in both intelligence as well as in fighting power. Control EV3RSTORM with your smartphone or tablet by downloading the free LEGO® MINDSTORMS® Robot Commander app from your app store. Build instructions |

|
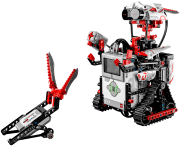
BOBB3E
Designed by Kenneth Ravnshøj Madsen |
|
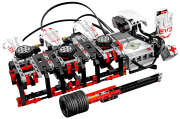
BANNER PRINT3R
Designed by Ralph Hempel |
|
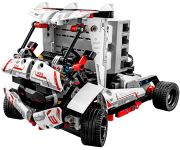
RAC3 TRUCK
Designed by Laurens Valk |
|
DINOR3X
Designed by Lasse Stenbæk Lauesen |
|
KRAZ3
Designed by Marc Andre Bazergui |

|
EV3D4
Designed by Vassilis Chryssanthakopoulos |
|
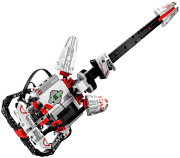
EL3CTRIC GUITAR
Designed by Daniele Benedettelli |

|
EV3MEG
Designed by Martyn Boogaarts |

|
EV3 GAME
Designed by Ricardo Oliveira |
|
MR. B3AM
Designed by Kenneth Ravnshøj Madsen |
|
ROBODOZ3R
Designed by Mark Crosbie |
|
WACK3M
Designed by Martyn Boogaarts |

|
DOODLEBOT
Use the LEGO® MINDSTORMS® DOODLEBOT to draw your own artistic doodles – or set it in self-portrait mode for a
drawing of itself, by itself. Place paper under the robot, position a pen in its arms, and use the EV3 remote to
draw your own fanciful works of art. The robot comes preprogrammed with three different drawing modes. |

|
CUCKOO CLOCK
The LEGO MINDSTORMS Cuckoo Clock is a working cuckoo and alarm clock. It tells the time.
It has a cuckoo bird that jumps out to ‘cuckoo’ every 15 minutes. And it has an alarm function that triggers a moving,
shooting vehicle to get you out of bed. |

|
AnglerfishDo you like fishing? If so, you must have heard about anglerfishes. This Anglerfish behaves the same way. Just move the robot as if it was swimming. If this movement detected by the Gyro sensor, open its mounth. Then you need to take an item in front of the Color sensor as if it was the fish. After that, put it into the mounth of the Anglerfish. Be careful! It bites. Build instructions |
|
Ball ConveyorIt is one example of many possible solutions for making system to move balls. It waits until the Color sensor sees a change in reflected light intensity mode then the conveyor lifts the ball up onto the ramp. The system waits until the Touch sensor is pressed by the ball. Finally, your program should generate a number between -1 and 1 and based on this value, it should throw the ball to the right or left. Build instructions |

|
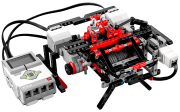
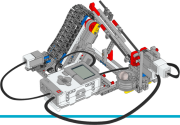
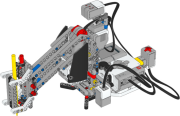
Bevel BotIf you build the Bevel Bot, you will show how to build a gearbox using 12-tooth bevel gear along with the 16-tooth straight gear with double bevels. These gears actually rotate at right angles to each other. Since the medium motor drives the smaller gear, the output of your gearbox is actually slower than the motor. However the robot will be slower, you will gain torque in this system. Build instructions |

|
Color SorterThis Color Sorter is used for sorting colored items. It uses two motors. The large motor moves the head of the sorter on conveyor belt according to the color of the item and the medium motor pushes out it. You need to detect the color of the item using the Color sensor next to the Brick before putting it into the sorter. Build instructions |
|
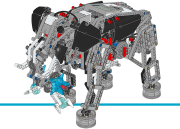
ElephantWhat do you think about which parts you could control this Elephant? You can move it forward or backward, and pick up an object or lift the trunk. Implement these movements using the EV3 buttons and see how it works! For a better feeling, write a core to play an elephant sound when the middle button is pressed! Build instructions |

|
FlowerHow beautiful when the sun shines and the flowers are opening, is not it? You can perfectly simulate this wonderful activity using the Flower robot. It should open when the light intensity is high and close when it is low. You just need to write a simple code that does this. Use the Touch sensor to instantly close it. Build instructions |

|
Gear BotDo you notice the two gears on the robot's wheels? This is why it is called Gear Bot. Due to these gears, the robot can only go slowly, but it is much stronger. You can test its power by building a rising track. See how it goes! Build instructions |
|
Gyro BoyTry to keep the robot in balance by changing his speed depending on the information coming from Gyro sensor. If the robot has fallen, put it back on the stand and use the Touch sensor to start it again. The Ultrasonic sensor is responsible for checking if an obstacle is in front of the robot. If there is, the robot should stop then turn away by moving slightly back and waving its arms. There is also a Color sensor, use it for changing the behavior of the robot. Build instructions |

|
GorillaShake your hand with the Gorilla to make him happy! This robot is ideal for creating a robotics system that interprets different signals and responds to them with different behavior. Your task is to write a program that controls the Gorilla. It should raise his arm if it detects that you are close to it and wait until the Touch sensor is bumped. After that, it should rise his both arms then move them in opposite directions for a while. But if the Ultrasonic sensor detects someone close and it is dark, then it should not do anything. Build instructions |
|
InsectWhould you like to program a robotic creature that can sense its environment and respond by moving? If so, you need to build the Insect and write a program for controlling it. The program should start when you press the black wings of the Insect. If they are pressed, you should start its motors forward for some seconds then backward for some seconds. If the Ultrasonic sensor sees something, the program should turn both motors forward at 100% until the Touch sensor on the front of the Insect is pressed. Build instructions |
|
Plot botWhat do you think I would say you can drawing by controlling a robot? You will be able to do it if you build this Plot Bot! You just need to insert a pen or pencil to the pencil case of the robot and drive it! It will draw a line as you drive your robot. Build instructions |
|
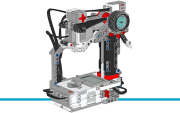
Pen armThis is a smart way to draw circles or semi-circles on a paper like a compass. On the top of the arm, you can find a Gyro sensor. Using this sensor, you can determine in degrees how long the arc length is of the circular sector you want to draw. The Touch sensor is responsible for starting the drawing. Use the Color sensor to draw preset circles. Build instructions |
|
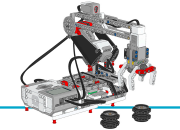
Pick and PlaceThis solution is one example of many possible solutions for making systems that pick and place objects. Robots with such construction are often used in the automotive industry. Bump the Touch sensor to start the program and reset the Gyro sensor. Pick up an object then place it to other direction using only the Gyro sensor. Then put it down and turn back to the previous state and grab another one, and so on. Repeat these steps until the Color sensor sees dark. Build instructions |

|
PuppyThe goal of this puppy robot to make him happy. Write a program that simulates 7 possible behaviors: sleeping, payful, angry, hungry, bathroom, happy and waking up. You can use the Touch sensor on his back and the Color sensor near his month to pet and feed him. There are also 2 motors for standing up and sitting down the puppy and 1 for shaking his head. Use randomly generated numbers of pets and feeds as target. If you reach those targets, he will become happy. Build instructions |
|
Remote ControlWould you like to remotely control another robot? Then you should build this Remote Controller! You can move a robot forward and backward by rotating this Controller forward and backward. You can use the wheen on the Controller for turning a robot for example right and left. There is also a Touch sensor for signaling to the robot to do some action. Build instructions |
|
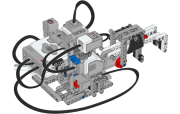
Robot ArmYou can use this robot to move an item from one place to another. You can define movement patterns for the robot exactly where to pick up the items and where to place them. Identify the patterns with the colors and use the Color sensor to set the required pattern. Finally, press the Touch sensor to start the operation. Build instructions |
|
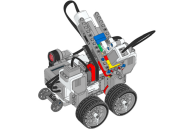
Sorter BotThis robot rolls on wheels and puts items in a different position according to their colors. There are two large motors to drive the sorter. The medium motor is responsible for pushing the item out. Use the Ultrasonic sensor to avoid wall hitting. Build instructions |
|
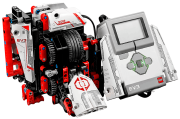
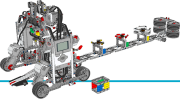
Spinner FactoryIt is an example of automation on a small scale. You can build a working model of a production line and program the steps need to construct and launch a spinning top. Use the color sensor to specify the items to be spin. Then the robot looks at all the items and collects the required ones by pressing the Touch sensor. Finally, spin them out using the medium motor. Build instructions |

|
Stair ClimberUse this robot for climbing stairs! In order to move the rear section of the robot, the entire robot must have in sync, so the rear wheels are moved at the same time as the rear stucture. Once the structure hits its limit by hitting the Touch sensor, it is moved slowsly to its start position. The Gyro sensor helps you to keep the robot in balance while climbing. Use the middle button of the Brick to increase the number of stairs to be climbed. Build instructions |

|
Tank BotDrive the Tank Bot in a shapes based on button presses. Create a program to control the reactions when the buttons on the Brick are pressed. The Brick has 5 buttons, so you can drive the robot along 5 different shapes: triangle, rectangle, pentagon, etc. Do not forget to draw the current shape on the display! Build instructions |
|
Toddle BotThis Toddle Bot acts just like the real toddlers: crawl on all fours. If you would like to see something cute, you have to build it! It is really simple to build it and you just need to drive 2 motors. Build instructions |

|
TurtleThe turtles often retract their neck when you touch them. You should write a program that draws two eyes on the EV3 display. If the Turtle was rotated many times, you should animate its eyes as if the Turtle was dizzy. Build instructions |
|
ZnapBite if someone is too close! Znap is a reactive robot who want to drive around in small pattern and react to an object in front of him. Write a program to check if someone is too close. If yes, warn him with a hiss. If he come closer, do a full bite! Build instructions |